

Bài viết này mình sẽ chia sẻ cho các bạn một bản thiết kế mạch cầu H điều khiển động cơ DC tích hợp PID. Mình đã sử dụng nó qua các cuộc thi Robocon từ cấp trường cho đến Robocon toàn quốc trong nhiều năm. Mình sẽ không lan man quá sâu về lý thuyết của cầu H mà chỉ tập trung vào việc thiết kế mạch. Chương trình vi điều khiển để điều khiển cầu H và triển khai thuật toán PID sẽ được trình bày tổng quát.
Sơ đồ nguyên lý
Mạch cầu H bao gồm các thành phần sau:
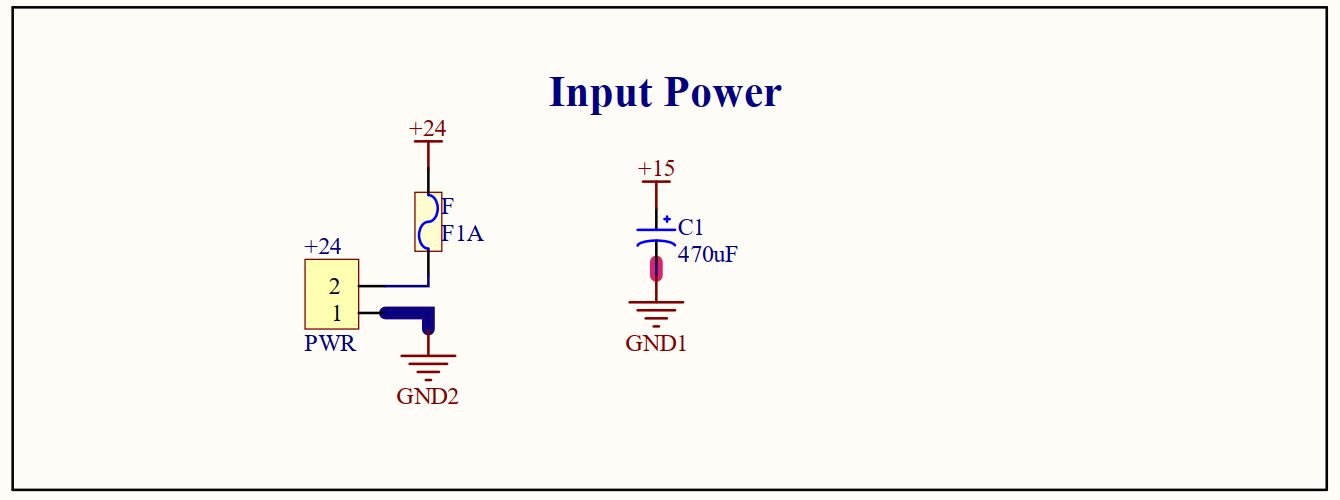
Khối lọc và bảo vệ đầu vào
Nguồn 24V cung cấp cho phần công suất của mạch sẽ đi qua cầu chì bảo vệ và tụ hóa 470uF/50V. Cầu chì có tác dụng bảo vệ mạch khi có hiện tượng đoản mạch, hay quá tải, giá trị lựa chọn khoảng 10A. Tụ điện có tác dụng là phẳng và ổn định điện áp khi công suất tiêu thụ thay đổi đột ngột.
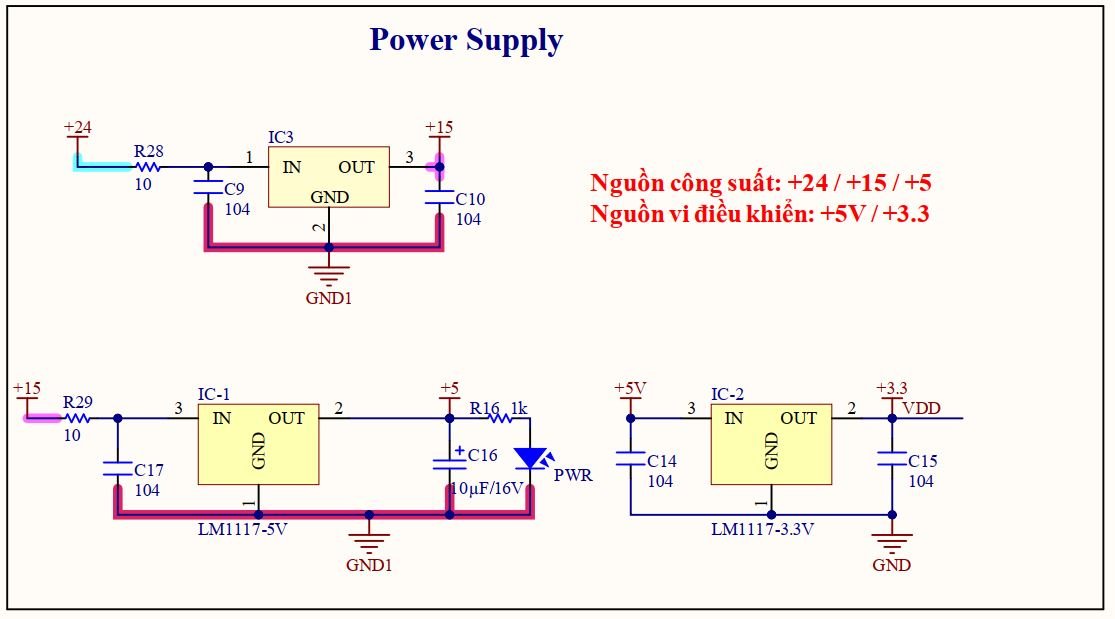
Khối nguồn
Nguồn trên mạch được chia làm 2 loại là nguồn công suất và nguồn điều khiển. Việc tách riêng biệt 2 nguồn này nhằm mục đích tránh ảnh hưởng nhiễu trong quá trình chạy từ phần công suất sang vi điều khiển, giúp mạch chạy ổn định.
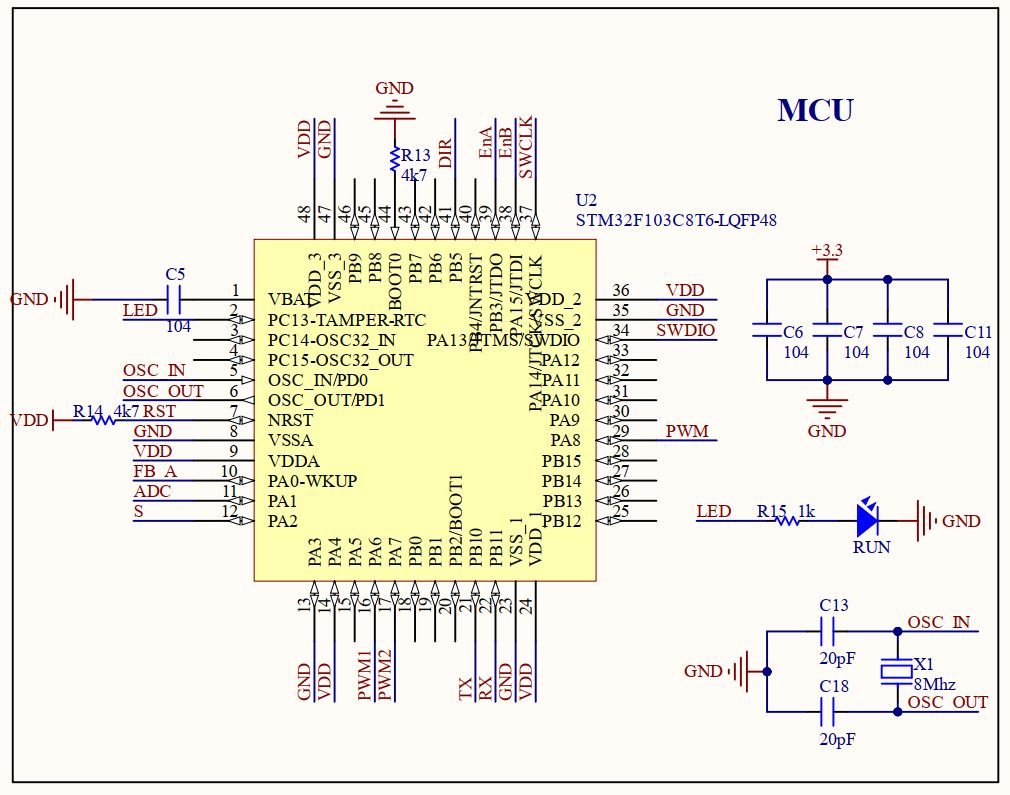
Khối MCU
Đây là khối chứa vi điều khiển STM32F103C8T6. Việc tích hợp vi điều khiển lên trên mạch cầu H có ưu điểm là có thể triển khai tại chỗ các thuật toán điều khiển ổn định tốc độ, momen động cơ, cụ thể ở đây mình đang sử dụng là thuật toán PID.
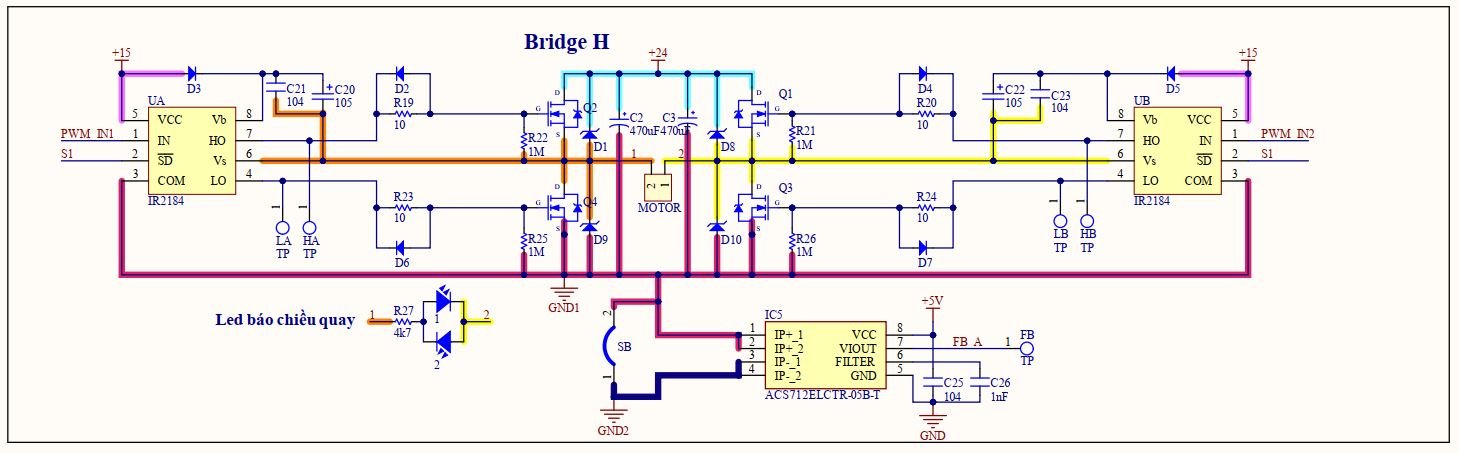
Khối cầu H
Ở khối này hạt nhân chính là 4 mosfet IRF3205 tạo nên cầu H và 2 ic lái mosfet IR2184.
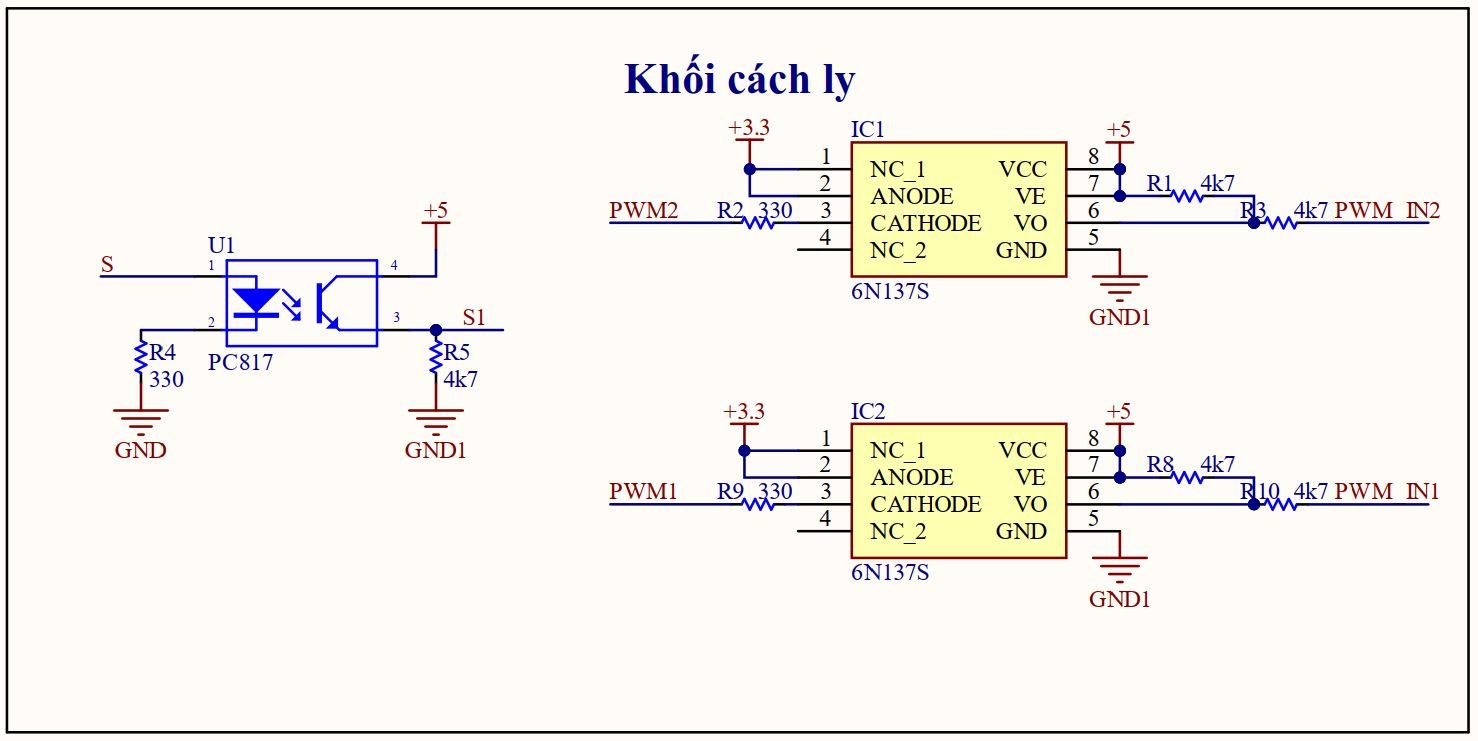
Khối cách ly tín hiệu
Khối sử dụng 2 IC 6N137S để cách ly tín hiệu PWM từ vi điều khiển cấp cho IR2184 điều khiển mosfet, 1 IC PC817 để cách ly tín hiệu điều khiển ON/OFF cho 2 IC IR2184.
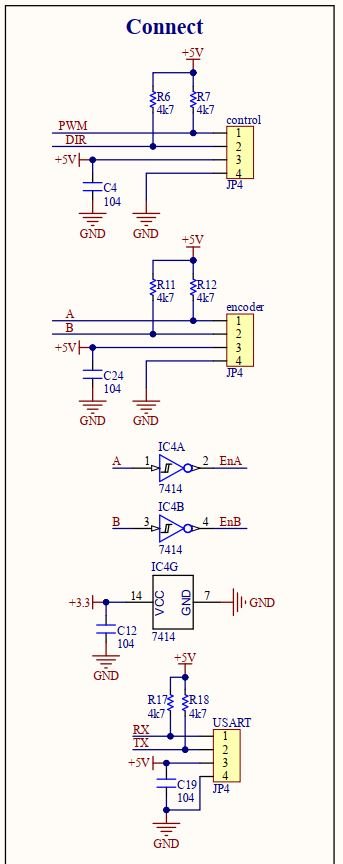
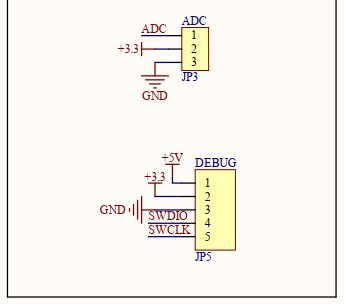
Khối vào ra
Khối vào ra bao gồm các connector để kết nối với mạch điều khiển trung tâm theo chuẩn PWM, kết nối Encoder AB, kết nối với mạch nạp ST Link.
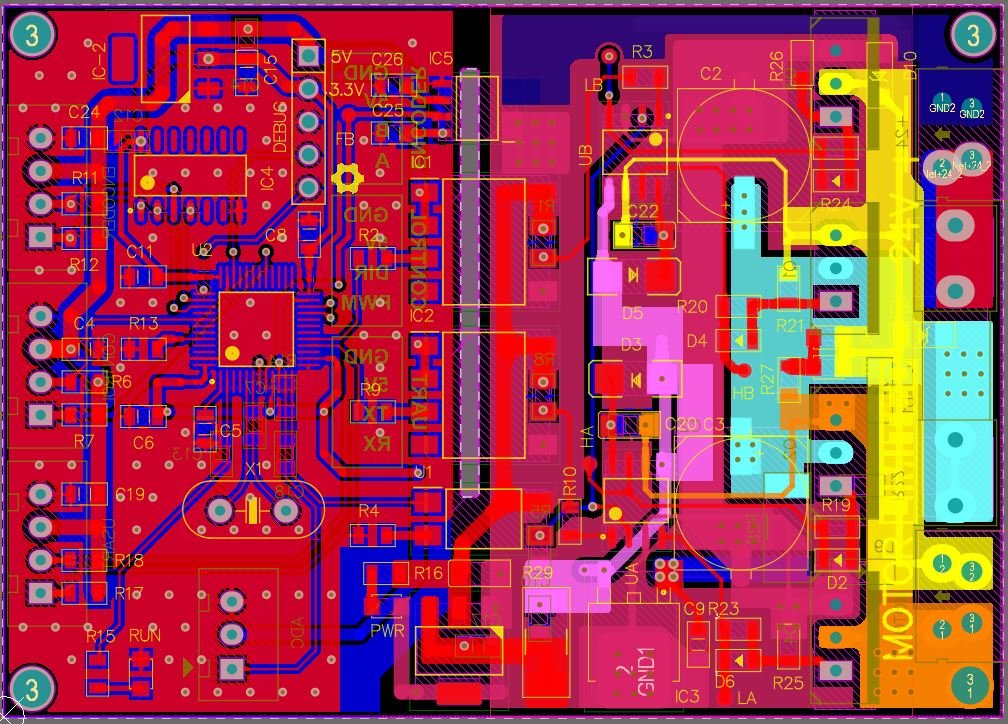
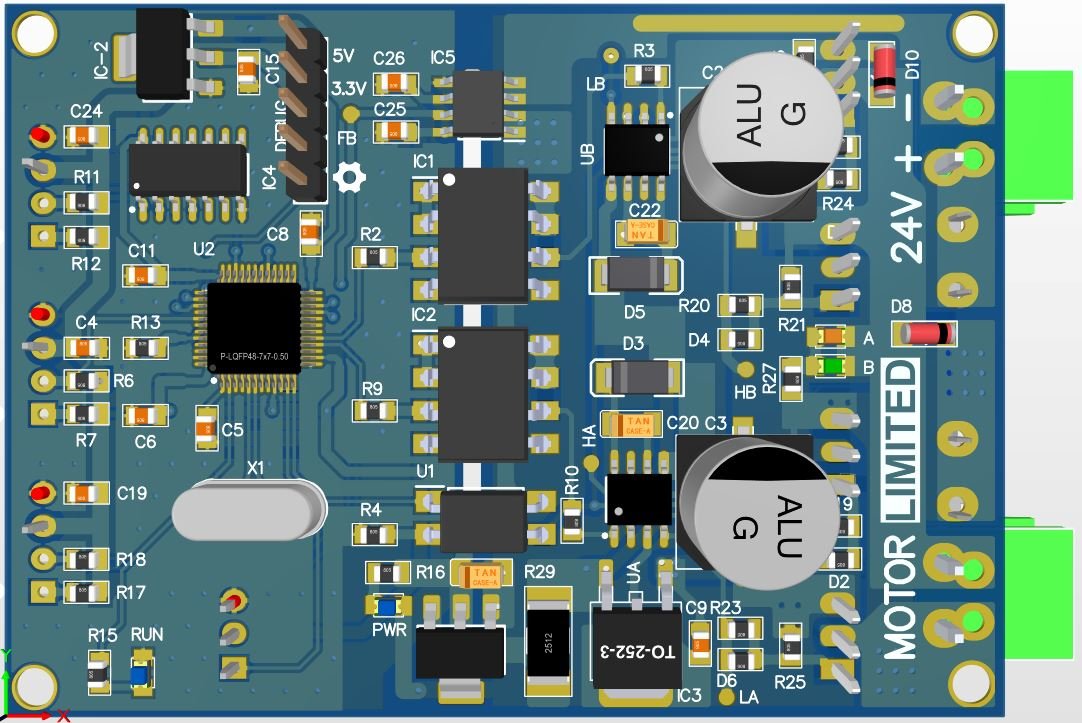
Sơ đồ mạch in
Mạch in được thiết kế 2 lớp, các đường công suất được mở rộng đảm bảo đủ tải.
Chương trình vi điều khiển
File thiết kế mạch và source code các bạn tải xuống tại đây!



{kind=link}